Моделювання в апаратному забезпеченні (SIH)
WARNING
Цей симулятор підтримується та обслуговується спільнотою. Він може працювати або не працювати з поточними версіями PX4 (відомо, що він працює в PX4 v1.14).
Перегляньте розділ Встановлення ланцюжка інструментів, щоб отримати інформацію про середовища та інструменти, які підтримуються основною командою розробників.
Симуляція у апаратному забезпеченні (SIH) - це альтернатива симуляції у апаратному забезпеченні (HITL) для квадрокоптерів, фіксованих крил (літаків) та VTOL хвостоподібних.
SIH може бути використано новими користувачами PX4 для знайомства з PX4 та різними режимами та функціями, а також, звичайно, для навчання польоту транспортного засобу за допомогою пульту керування в симуляції, що неможливо з SITL.
Загальний огляд
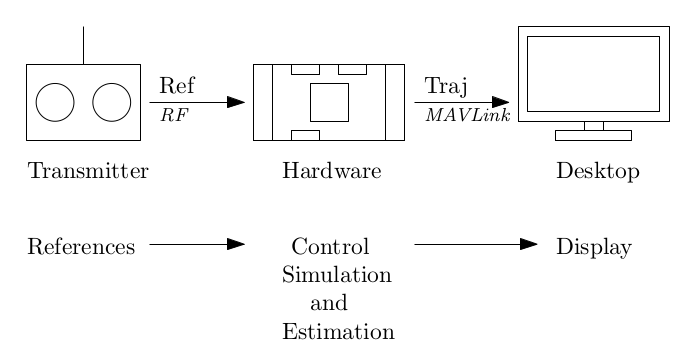
З SIH вся симуляція працює на вбудованому обладнанні: контролер, оцінювач стану та симулятор. Комп'ютер на робочому столі використовується лише для відображення віртуального транспортного засобу.
Сумісність
- SIH сумісний з усіма платами серії Pixhawk, за винятком тих, що базуються на FMUv2.
- SIH для квадрокоптера підтримується з версії PX4 v1.9.
- SIH для фіксованих крил (літака) та VTOL-конвертоплана підтримується з версії PX4 v1.13.
- SIH як SITL (без апаратного забезпечення) з версії PX4 v1.14.
Переваги
SIH має кілька переваг перед HITL:
- Він забезпечує синхронізований час, уникаючи двостороннього з'єднання з комп'ютером. В результаті користувачеві не потрібен такий потужний настільний комп'ютер.
- Усе моделювання залишається в середовищі PX4. Розробники, які знайомі з PX4, можуть легше включити свою власну математичну модель в симулятор. Вони, наприклад, можуть змінити аеродинамічну модель або рівень шуму датчиків, або навіть додати датчик для симуляції.
- Фізичні параметри, які представляють транспортний засіб (такі як маса, інерція та максимальна сила тяги), можна легко змінити з параметрів SIH.
Вимоги
Щоб запустити SIH, вам знадобиться:
- Контролер польоту, наприклад плата серії Pixhawk
- Розробка комп'ютера для відображення віртуального автомобіля.
- Ручне управління: або радіосистема управління, або джойстик.
Починаючи з PX4 v1.14, ви можете запускати SIH "як SITL", у цьому випадку контролер польоту не потрібен.
Налаштування SIH
Щоб налаштувати SIH
- Підключіть контролер польоту до настільного комп’ютера за допомогою кабелю USB
- Відкрийте QGroundControl і зачекайте, поки контролер польоту також завантажиться та підключиться.
- Відкрийте Vehicle Setup > Airframe, а потім виберіть потрібний каркас:
Потім автопілот перезавантажиться. Після перезапуску модуль sih запускається, і транспортний засіб має відображатися на карті наземної станції керування.
WARNING
Літак повинен злітати в ручному режимі на повному газі. Крім того, якщо літак розбився, оцінювач стану може втратити своє виправлення.
Налаштування відображення
Для відображення симульованого транспортного засобу:
Закрийте QGroundControl (якщо відкрито).
Відключіть і знову підключіть контролер польоту (дайте декілька секунд на його завантаження).
Запустіть jMAVSim, викликавши скрипт jmavsim_run.sh з терміналу:
sh./Tools/simulation/jmavsim/jmavsim_run.sh -q -d /dev/ttyACM0 -b 2000000 -oде прапорці такі:
-q, щоб дозволити зв'язок з QGroundControl (необов'язково).-d, щоб розпочати роботу з послідовним пристроєм/dev/ttyACM0на Linux. На macOS це буде/dev/tty.usbmodem1.-b, щоб встановити швидкість передачі даних через послідовний порт на2000000.-o, щоб запустити jMAVSim тільки у режимі відображення (тобто фізичний двигун вимкнено, і jMAVSim лише відображає траєкторію, надану SIH в реальному часі).- додайте прапорець
-a, щоб відобразити літак, або '-t', щоб відобразити вертикальнітник. Якщо цей прапорець не вказаний, за замовчуванням відображатиметься квадрокоптер.
Через кілька секунд можна знову відкрити QGroundControl.
На цьому етапі систему можна запустити та вивести в польот. Транспортний засіб можна спостерігати за рухом в jMAVSim та на екрані польоту QGC.
Запуск SIH як SITL (без апаратних засобів)
SIH можна запустити як SITL (Software-In-The-Loop) з версії 1.14. Це означає, що код симуляції виконується на ноутбуці/комп'ютері, подібно до Gazebo або jMAVSim. У цьому випадку не потрібне апаратне забезпечення контролера польоту.
Для запуску SIH як SITL:
Встановіть PX4 набір інструментів розробника.
Виконайте відповідну команду make для кожного типу транспортного засобу (в корені репозиторію PX4-Autopilot):
квадротор:
shmake px4_sitl sihsim_quadxЗакріплені крила (літаки):
shmake px4_sitl sihsim_airplaneXVert VTOL tailsitter:
shmake px4_sitl sihsim_xvert
SITL дозволяє виконувати симуляцію швидше, ніж у реальному часі. Щоб запустити симуляцію літака в 10 разів швидше, ніж у реальному часі, запустіть команду L
sh
PX4_SIM_SPEED_FACTOR=10 make px4_sitl sihsim_airplaneДинамічний режим
Динамічні моделі для різних транспортних засобів:
- Квадротор: pdf звіт.
- З нерухомим крилом: на основі кандидатської дисертації: «Моделювання динаміки маневрених безпілотних літальних апаратів з нерухомим крилом» Khan, Waqas, під керівництвом Nahon, Meyer, Університет Макгілла, докторська дисертація, 2016.
- Tailsitter: Натхненний магістерською дисертацією: «Моделювання та керування безпілотним літальним апаратом з літаючим крилом» Chiappinelli, Romain, під керівництвом Nahon, Meyer, Університет Макгілла, магістерська робота, 2018.
Відео
Автори
SIH спочатку був розроблений компанією Coriolis g Corporation. Модель літака та моделі вертикальних засідателів були додані компанією Altitude R&D inc. Обидві ці компанії знаходяться в Канаді:
- Coriolis g розробляє новий тип транспортних засобів вертикального зльоту та посадки (VTOL) на основі пасивних зв'язуючих систем;
- Altitude R&D спеціалізується на динаміці, керуванні та реальному часім симуляціям.
Симулятор випущений безкоштовно під ліцензією BSD.