Діагностичний набір mosaic-go Septentrio
Оціночний комплект mosaic-go складається з модуля mosaic, розпаяного на інтерфейсній платі всередині металевого корпусу.
Розміром всього 71 х 59 х 12 мм і вагою всього 58 г, mosaic-go пропонує неперевершений співвідношення розміру до продуктивності. mosaic-go містить:
Висока швидкість оновлення (>100 Гц) та низька затримка, обидва важливі для систем управління автономних додатків
Надійне позиціонування на рівні декількох сантиметрів
Повна підтримка L2 через код P(Y)
Номер частини Mosaic-go: Версія з однією антеною, яка включає mosaic-X5: 410386 (включаючи аксесуари). Подвійна антенна версія, включаючи мозаїчне-H: 410397 (включаючи аксесуари).
Розмір: 71 x 59 x 12 мм ± 1 мм
Вага: 58г ± 1г

Купівля
Набір mosaic-go доступний у офіційному магазині Septentrio.
Інші пристрої з підтримкою PX4 від Septentrio:
Набір для оцінки заголовка mosaic-go містить:
- 1 модуль mosaic-H або mosaic-X5, зварений на інтерфейсну плату всередині металевого корпусу.
- 1 USB кабель
- Кабель COM1 з відкритими контактами на 6 контактів
- Кабель з відкритим кінцем COM2 на 4 контактній роз'єм
- Довідник користувача карта
Інтерфейси
USB-C
Тип роз'єму: мікро-USB типу B.
Цей мікро-B роз'єм використовується для доступу до mosaic-go через USB. Це також може бути використано для живлення мозаїки-go.
RSV USB
Тип підключення: micro-USB type B.
Цей з'єднувач зарезервований і не повинен використовуватися.
RF_IN1 та RF_IN2
Тип роз'єму: SMA.
Це основні та додаткові роз'єми антен, підключені до контактів ANT_1 та ANT_2 внутрішнього мозаїчного. Mosaic-go надає живлення постійного струму 5 В по обох роз'ємах антени. Спільне споживання потужності основної та допоміжної антени не повинно перевищувати 150 мА.
Зверніть увагу, що RF_IN2 доступний лише на двох антенах mosaic-go.
Карта TF
Тип роз'єму: MicroSD.
Роз'єм для картки micro SD. Модуль може зберігати файли (SBF/NMEA) на картку micro SD у цьому гнізді.
6-pin Connector
Тип роз'єму: GH роз'єм, шаг 1,25 мм, 6 контактів. Корпус роз'єму для з'єднання: GHR-06V-S.
| Назва виводу | Напрямок | Рівень | Опис | Коментар |
|---|---|---|---|---|
| VCC | PWR | 4.75V-5.5V | Головне джерело живлення | |
| GND | 0 | Ground | ||
| TXD1 | Out | 3V3_LVTTL | Serial COM1 transmit line | Підключається безпосередньо до TXD1 внутрішньої mosaic |
| RXD1 | In | 3V3_LVTTL | Serial COM1 receive line | Підключається безпосередньо до RXD1 внутрішньої mosaic |
| PPS | Out | 3V3_LVTTL | PPSoutput | PPSO з mosaic перетворений на 3,3 В |
| EVENT | In | 3V3_LVTTL | Вхідний таймер події | Підключається до EVENTA mosaic через транслятор рівня 3V3 на 1V8 |
4-pin Connector
Тип роз'єму: роз'єм GH, шаг 1,25 мм, 4 шляхи. Корпус роз'єму для з'єднання: GHR-04V-S.
| Назва виводу | Напрямок | Рівень | Опис | Коментар |
|---|---|---|---|---|
| NRST | In | 3V3_LVTTL | Reset input | Підключається безпосередньо до nRST_IN внутрішньої mosaic |
| TXD2 | Out | 3V3_LVTTL | Serial COM2 transmit line | Підключається безпосередньо до TXD2 внутрішньої mosaic |
| RXD2 | In | 3V3_LVTTL | Serial COM2 receive line | Підключається безпосередньо до RXD2 внутрішньої mosaic |
| GND | 0 | Ground |
Налаштування обладнання

- Переконайтеся, що приймач живиться щонайменше 3,3 В. Ви можете використовувати роз'єм micro USB або 6-контактний роз'єм.
- Підключіть одну або дві антени GNSS до портів RF-IN на пристрої mosaic-go.
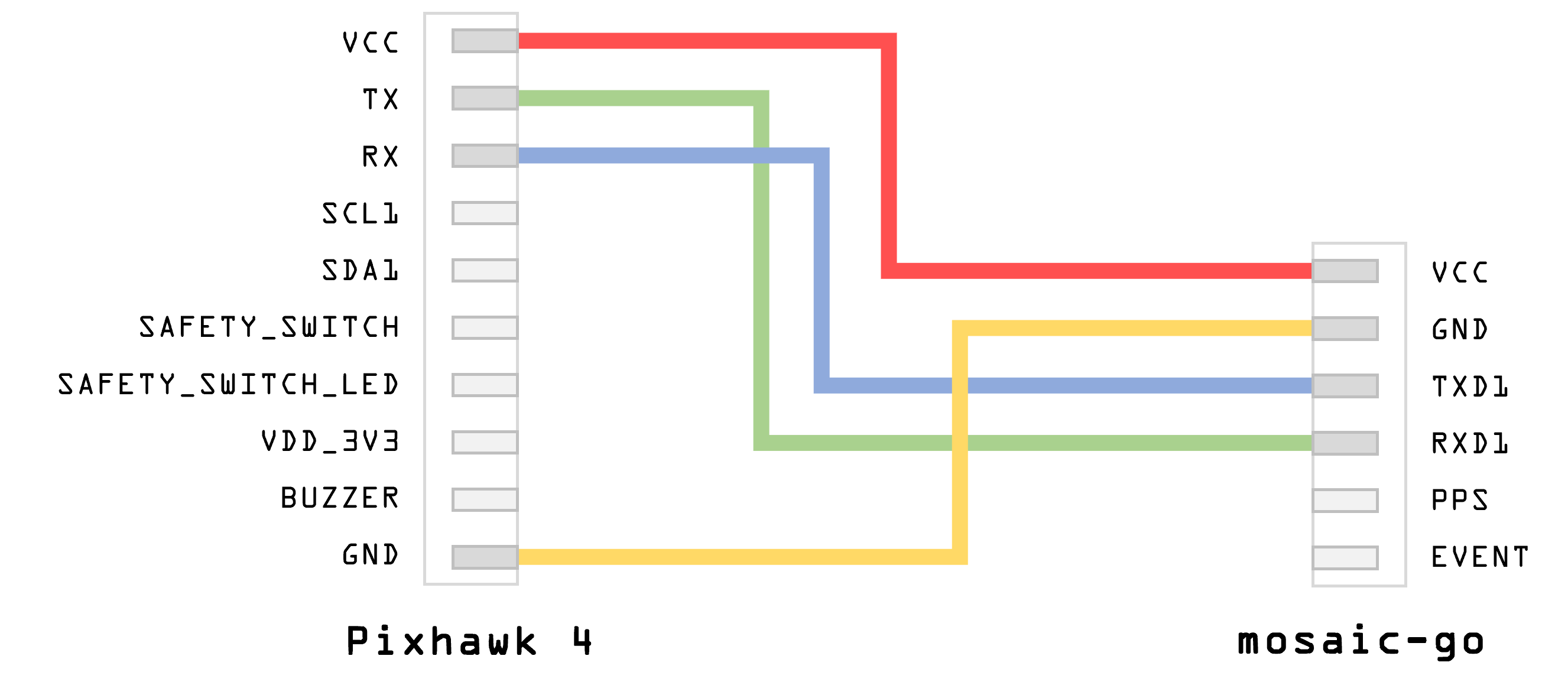
- Підключіть 6-контактний коннектор (COM1) до роз'єму
GPS MODULEPixhawk. Це забезпечить живлення для mosaic-go, і за допомогою цього одного з'єднання він зможе надсилати інформацію про одинарну та подвійну антени до Pixhawk 4. - У веб-інтерфейсі або за допомогою інструментів Rx встановіть швидкість передачі даних приймача на 115200 Admin > Expert Control > Control Panel > Communication > COM Port Settings (це значення за замовчуванням).
WARNING
Переконайтеся, що кабель JST підключено правильно (оскільки це не стандартний кабель):
::: інформація PX4 гарантує, що модуль GNSS буде автоматично налаштований, однак, якщо у вас встановлено подвійну антену, необхідно встановити компонування якнайточніше в веб-додатку. :::
Подвійна антена
Ставлення (клін/тангаж) може бути обчислене з орієнтації базової лінії між основною та допоміжною антенами GNSS aux1.
Для забезпечення визначення багатоантенного стану слід дотримуватися наступної процедури:
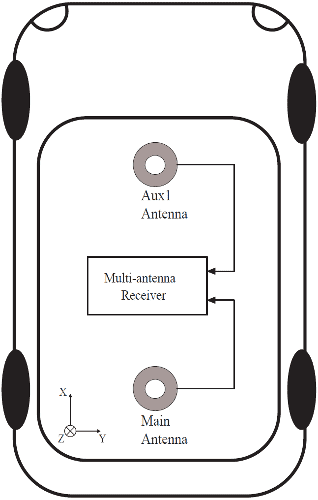
- Приєднайте дві антени до вашого автомобіля, використовуючи кабелі приблизно однакової довжини. Конфігурація антени за замовчуванням така, як показано на малюнку. Це полягає у розташуванні антен, вирівняних з віссю транспортного засобу, основна антена за AUX1. Для найкращої точності спробуйте максимізувати відстань між антенами та уникайте значних висотних відмінностей між ЛАР антенами.
- На практиці дві антени ARPs можуть не бути розташовані на однаковій висоті в рамі транспортного засобу, або базова лінія головна-допоміжна1 може не бути абсолютно паралельною або перпендикулярною до поздовжньої вісі транспортного засобу. Це призводить до зміщень у обчислених кутах нахилу. Ці зрушення можна компенсувати за допомогою команди setAttitudeOffset.
INFO
Для оптимальних результатів підпису, дві антени повинні бути відокремлені принаймні на 30 см / 11,8 дюйма (ідеально 50 см / 19,7 дюйма або більше)
Для додаткової настройки двох антен, будь ласка, зверніться до нашої бази знань або керівства з обслуговування
Веб-додаток
модуль приймача GPS/GNSS з компасом mosaic-H поставляється з повністю задокументованими інтерфейсами, командами та даними повідомленнями. Включене програмне забезпечення керування та аналізу приймача GNSS RxTools дозволяє настроювання приймача, моніторинг, а також реєстрацію та аналіз даних.
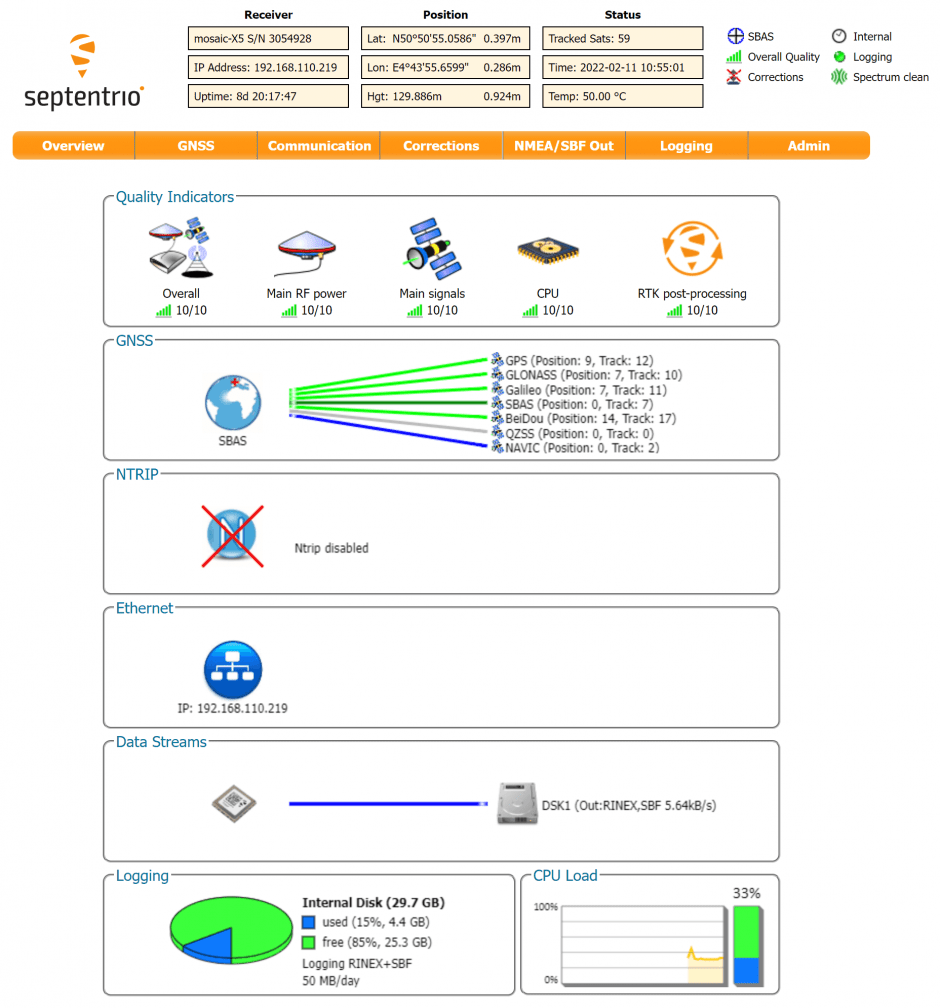
Отримувач містить інтуїтивний веб-інтерфейс користувача для легкої роботи та контролю, що дозволяє вам керувати отримувачем з будь-якого мобільного пристрою або комп'ютера. Веб-інтерфейс також використовує легко читані показники якості, ідеальні для контролю операції приймача під час виконання завдання.
Налаштування PX4
Одинарна антена
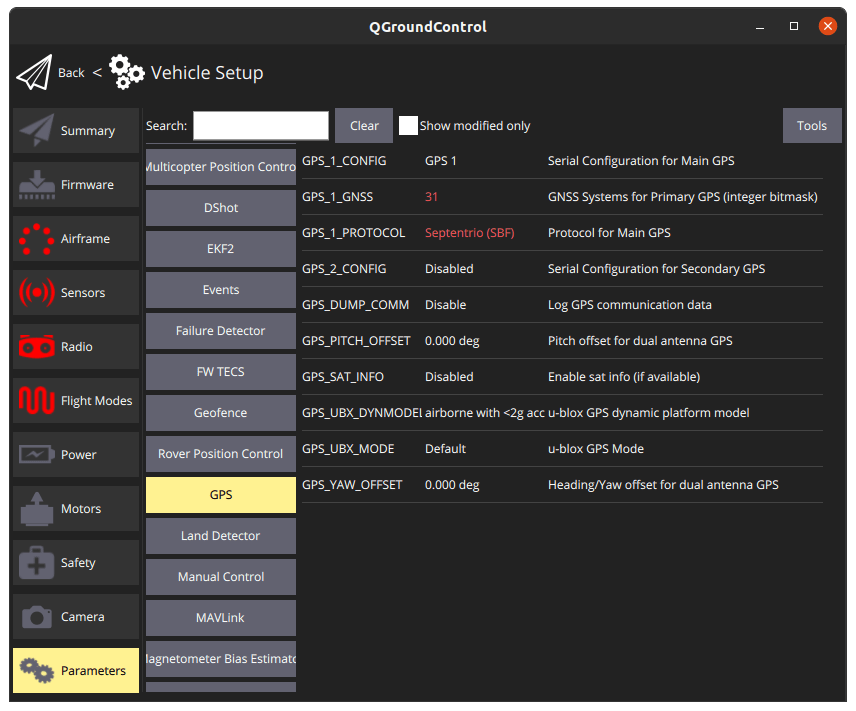
Відредагуйте наступні параметри на вкладці GPS:
- GPS_1_CONFIG: GPS 1
- GPS_1_GNSS: 31
- Протокол GPS_1_PROTOCOL: Автоматичне визначення (або SBF)
- SER_GPS1_BAUD: 115200 8N1
Перейдіть до Інструменти > Перезавантаження Транспортного Засобу
Подвійна антена
Редагуйте наступні параметри на вкладці GPS:
- GPS_1_CONFIG: GPS 1
- GPS_1_GNSS: 31
- Протокол GPS_1_PROTOCOL: Автоматичне визначення (або SBF)
- SER_GPS1_BAUD: 115200 8N1
- EKF2_GPS_CTRL: Додайте біт 3 (подвійний кут антени), який додається до 15
- GPS_PITCH_OFFSET: встановіть відповідно до вашої настройки (зауважте, що Aux впереді під час нульового зміщення)
- GPS_YAW_OFFSET: встановіть відповідно до вашої настройки (зауважте, що Aux спрямована вперед при нульовому зміщенні)
Перейдіть до Інструменти > Перезавантаження Транспортного Засобу
Статус LED
| Колір світлодіоду | Живлення | SD карта змонтована | PVT Solution | Logging enabled |
|---|---|---|---|---|
| Red | ✓️ | |||
| Green | ✓️ | ✓️ | ||
| Blue | ✓️ | ✓️ | ✓️ | |
| Purple | ✓️ | ✓️ | ||
| Purple + Blue | ✓️ | ✓️ | ✓️ | ✓️ |
| Red + Green | ✓️ | ✓️ | ✓️ |
TIP
Для більш детальної інформації про mosaic-go та його модуль, будь ласка, зверніться до посібника з апаратного забезпечення або сторінки Підтримка Septentrio.