ROS 2 Посібник користувача
Архітектура ROS 2-PX4 забезпечує глибоку інтеграцію між ROS 2 і PX4, дозволяючи підписникам ROS 2 або вузлам видавців безпосередньо взаємодіяти з темами uORB PX4.
Ця тема містить огляд архітектури та пайплайну додатків, а також пояснює, як налаштувати та використовувати ROS 2 з PX4.
Починаючи з PX4 v1.14, ROS 2 використовує проміжне програмне забезпечення uXRCE-DDS, яке замінило проміжне програмне забезпечення FastRTPS, що використовувалося у версії 1.13 (версія 1.13 не підтримує uXRCE-DDS).
У посібнику з міграції пояснюється, що потрібно зробити, щоб перенести програми ROS 2 з PX4 v1.13 на PX4 v1.14.
Якщо ви досі працюєте на PX4 v1.13, дотримуйтесь інструкцій в PX4 v1.13 Docs.
Загальний огляд
Пайплайн додатків для ROS 2 дуже простий завдяки використанню комунікаційного проміжного програмного забезпечення uXRCE-DDS.

Проміжне програмне забезпечення uXRCE-DDS складається з клієнта, що працює на PX4, і агента, що працює на комп'ютері-компаньйоні, з двостороннім обміном даними між ними по послідовному, UDP, TCP або користувацькому каналу зв'язку. Агент діє як проксі для клієнта з метою публікації та підписки на теми в глобальному просторі даних DDS.
PX4 клієнт uxrce_dds генерується під час збірки та за замовчуванням включений у прошивку PX4. Він включає як код клієнта "загального" мікро XRCE-DDS, так і код перекладу, специфічний для PX4, який він використовує для публікації/передачі даних з/у теми uORB. Підмножина повідомлень uORB, які генеруються в клієнті, перелічені в PX4-Autopilot/src/modules/uxrce_dds_client/dds_topics.yaml. Генератор використовує визначення повідомлень uORB у дереві джерела: PX4-Autopilot/msg, щоб створити код для відправлення повідомлень ROS 2.
Програми ROS 2 потрібно створювати в робочій області, яка має ті самі визначення повідомлень, які використовувалися для створення клієнтського модуля uXRCE-DDS у мікропрограмі PX4. Ви можете включити їх, клонуючи інтерфейсний пакет PX4/px4_msgs у своє робоче середовище ROS 2 (гілки у репозиторії відповідають повідомленням для різних випусків PX4).
Зверніть увагу, що сам по собі агент micro XRCE-DDS <0>не має залежності</0> від клієнтського коду. Це може бути побудовано з вихідний код або як самостійний елемент, або як частина збірки ROS, або встановлено як snap.
Зазвичай вам потрібно запустити як клієнт, так і агента при використанні ROS 2. Зверніть увагу, що клієнт uXRCE-DDS вбудований в прошивку за замовчуванням, але не запускається автоматично, за винятком збірок симулятора.
У PX4v1.13 та раніше, ROS 2 був залежний від визначень у px4_ros_com. Цей репозиторій більше не потрібен, але містить корисні приклади.
Встановлення та налаштування
Підтримувані платформи ROS 2 для розробки PX4 - ROS 2 "Humble" на Ubuntu 22.04 та ROS 2 "Foxy" на Ubuntu 20.04.
ROS 2 "Humble" рекомендується, оскільки це поточний розподіл ROS 2 LTS. ROS 2 "Foxy" досягла кінця свого життя в травні 2023 року, але все ще стабільна і працює з PX4.
PX4 не так добре протестований на Ubuntu 22.04, як на Ubuntu 20.04 (на момент написання), і Ubuntu 20.04 потрібний, якщо ви хочете використовувати Gazebo Classic.
Для налаштування ROS 2 для використання з PX4:
- Встановити PX4 (для використання симулятора PX4)
- Встановіть ROS 2
- Налаштування агента та клієнта Micro XRCE-DDS
- Створіть та запустіть робоче середовище ROS 2
Інші залежності архітектури, які встановлюються автоматично, такі як Fast DDS, не враховуються.
Встановлення PX4
Вам потрібно встановити інструментальний набір розробки PX4, щоб використовувати симулятор.
Єдиним залежністю ROS 2 від PX4 є набір визначень повідомлень, який він отримує з px4_msgs. Вам потрібно встановити PX4 лише в разі, якщо вам потрібен симулятор (як у цьому посібнику), або якщо ви створюєте збірку, яка публікує власні теми uORB.
Налаштуйте середовище розробки PX4 на Ubuntu звичайним шляхом:
sh
cd
git clone https://github.com/PX4/PX4-Autopilot.git --recursive
bash ./PX4-Autopilot/Tools/setup/ubuntu.sh
cd PX4-Autopilot/
make px4_sitlЗверніть увагу, що вищезазначені команди встановлять рекомендований симулятор для вашої версії Ubuntu. Якщо ви хочете встановити PX4, але зберегти вашу існуючу установку симулятора, запустіть ubuntu.sh вище з прапорцем --no-sim-tools.
Для отримання додаткової інформації та усунення неполадок див. Середовище розробки Ubuntu та Завантажити вихідний код PX4.
Встановлення ROS 2
Щоб встановити ROS 2 і його залежності:
Встановлення ROS 2.
:::
::::
Деякі Python залежності також мають бути встановленні (використовуючи
pipабоapt):shpip install --user -U empy==3.3.4 pyros-genmsg setuptools
Налаштування агента та клієнта Micro XRCE-DDS
Для того щоб ROS 2 міг спілкуватися з PX4, клієнт uXRCE-DDS повинен працювати на PX4, підключений до агента micro XRCE-DDS, який працює на компаньйоновому комп'ютері.
Налаштувати агента
Агент може бути встановлений на компаньйоновий комп'ютер різними способами. Нижче ми покажемо, як побудувати агента "standalone" з вихідних кодів та підключитися до клієнта, який працює на симуляторі PX4.
Для налаштування та запуску агента:
Відкрийте термінал.
Введіть наступні команди для витягування та побудови агента з вихідного коду:
shgit clone https://github.com/eProsima/Micro-XRCE-DDS-Agent.git cd Micro-XRCE-DDS-Agent mkdir build cd build cmake .. make sudo make install sudo ldconfig /usr/local/lib/Запустіть агента з налаштуваннями для підключення до клієнта uXRCE-DDS, який працює на симуляторі:
shMicroXRCEAgent udp4 -p 8888
Агент зараз працює, але ви не побачите багато, поки ми не почнемо PX4 (у наступному кроці).
::: інформація Ви можете залишити агента, що працює в цьому терміналі! Зверніть увагу, що дозволено лише одного агента на підключений канал зв'язку. :::
Запустіть клієнта
Симулятор PX4 автоматично запускає клієнт uXRCE-DDS, підключаючись до порту UDP 8888 на локальному хості.
Для запуску симулятора (і клієнта):
Відкрийте новий термінал в корені репозиторію PX4 Autopilot, який був встановлений вище.
:::
::::
Агент та клієнт зараз працюють, вони повинні підключитися.
Термінал PX4 відображає вивід NuttShell/PX4 Системна Консоль під час завантаження та роботи PX4. Як тільки агент підключає вихід, вивід повинен містити повідомлення INFO, що показують створення записувачів даних:
...
INFO [uxrce_dds_client] synchronized with time offset 1675929429203524us
INFO [uxrce_dds_client] successfully created rt/fmu/out/failsafe_flags data writer, topic id: 83
INFO [uxrce_dds_client] successfully created rt/fmu/out/sensor_combined data writer, topic id: 168
INFO [uxrce_dds_client] successfully created rt/fmu/out/timesync_status data writer, topic id: 188
...Термінал агента micro XRCE-DDS також повинен почати показувати вивід, оскільки в мережі DDS створюються еквівалентні теми:
...
[1675929445.268957] info | ProxyClient.cpp | create_publisher | publisher created | client_key: 0x00000001, publisher_id: 0x0DA(3), participant_id: 0x001(1)
[1675929445.269521] info | ProxyClient.cpp | create_datawriter | datawriter created | client_key: 0x00000001, datawriter_id: 0x0DA(5), publisher_id: 0x0DA(3)
[1675929445.270412] info | ProxyClient.cpp | create_topic | topic created | client_key: 0x00000001, topic_id: 0x0DF(2), participant_id: 0x001(1)
...Створення робочого простору ROS 2
Цей розділ показує, як створити робоче середовище ROS 2, розміщене в вашій домашній директорії (змініть команди за необхідності, щоб розмістити вихідний код в іншому місці).
Пакети px4_ros_com та px4_msgs клонуються до папки робочого простору, а потім використовується інструмент colcon для збірки робочого простору. Приклад виконується за допомогою ros2 launch.
Приклад будує Приклад застосунку ROS 2 Listener, розташований в px4_ros_com. px4_msgs також потрібний, щоб приклад міг інтерпретувати теми PX4 ROS 2.
Створення робочого простору
Створити та побудувати робочий простір:
Відкрийте новий термінал.
Створіть новий каталог робочого простору та перейдіть до нього за допомогою:
shmkdir -p ~/ws_sensor_combined/src/ cd ~/ws_sensor_combined/src/INFO
Узгодження імен для папок робочого простору може полегшити керування робочим простором. :::
Скопіюйте репозиторій прикладів і px4_msgs до каталогу
/src(за замовчуванням клоновано гілкуmain, яка відповідає версії PX4, яку ми запускаємо):shgit clone https://github.com/PX4/px4_msgs.git git clone https://github.com/PX4/px4_ros_com.gitСтворіть середовище розробки ROS 2 у поточному терміналі і скомпілюйте робочу область за допомогою
colcon:
:::
::::
У результаті буде зібрано усі каталоги у /src за допомогою вихідного набору інструментів.
Запуск прикладу
Щоб запустити виконувані файли, які ви щойно побудували, вам потрібно джерело local_setup.bash. Це надає доступ до "гаків середовища" для поточного робочого простору. Іншими словами, воно робить виконувані файли, що були тільки що побудовані, доступними в поточному терміналі.
У початкових навчальних посібниках ROS2 рекомендується відкрити новий термінал для запуску ваших виконавчих файлів.
В новому терміналі:
Перейдіть на верхній рівень каталогу вашого робочого простору та джерело середовища ROS 2 (у цьому випадку "Humble"):
:::
::::
Джерело
local_setup.bash.shsource install/local_setup.bashТепер запустіть приклад. Зверніть увагу, що тут ми використовуємо
ros2 launch, який описано нижче.ros2 launch px4_ros_com sensor_combined_listener.launch.py
Якщо це працює, ви повинні бачити дані, які друкуються на терміналі / консолі, де ви запустили слухача ROS:
sh
RECEIVED DATA FROM SENSOR COMBINED
================================
ts: 870938190
gyro_rad[0]: 0.00341645
gyro_rad[1]: 0.00626475
gyro_rad[2]: -0.000515705
gyro_integral_dt: 4739
accelerometer_timestamp_relative: 0
accelerometer_m_s2[0]: -0.273381
accelerometer_m_s2[1]: 0.0949186
accelerometer_m_s2[2]: -9.76044
accelerometer_integral_dt: 4739Керування Транспортним Засобом
Для контролю за додатками, додатки ROS 2:
- підписатися на (слухати) тематичні теми, опубліковані PX4
- опублікувати у темах, які спонукають PX4 виконати певну дію.
Теми, які ви можете використовувати, визначені в dds_topics.yaml, і ви можете отримати більше інформації про їх дані в Посилання на повідомлення uORB. Наприклад, VehicleGlobalPosition може бути використано для отримання глобального положення транспортного засобу, тоді як VehicleCommand може бути використано для виконання дій, таких як зльот та посадка.
Приклади застосувань ROS 2, наведені нижче, надають конкретні приклади того, як використовувати ці теми.
Проблеми сумісності
Цей розділ містить інформацію, яка може вплинути на те, як ви пишете свій код ROS.
Налаштування QoS підписника ROS 2
Код ROS 2, який підписується на теми, опубліковані PX4, повинен вказати відповідну (сумісну) настройку QoS, щоб слухати теми. Зокрема, вузли повинні підписатися, використовуючи попередньо визначену якість обслуговування даних сенсорів ROS 2 (з прикладу вихідного коду слухача):
cpp
...
rmw_qos_profile_t qos_profile = rmw_qos_profile_sensor_data;
auto qos = rclcpp::QoS(rclcpp::QoSInitialization(qos_profile.history, 5), qos_profile);
subscription_ = this->create_subscription<px4_msgs::msg::SensorCombined>("/fmu/out/sensor_combined", qos,
...Це потрібно, оскільки типові налаштування Якості обслуговування (QoS) ROS 2 відрізняються від налаштувань, що використовуються PX4. Не всі комбінації налаштувань якості обслуговування відправник-підписник Qos можливі, і виявляється, що типові налаштування ROS 2 для підписки не є такими! Зверніть увагу, що код ROS не повинен встановлювати налаштування QoS при публікації (налаштування PX4 сумісні з типовими налаштуваннями ROS у цьому випадку).
Узгодження систем координат ROS 2 & PX4
Локальна/світова та тілові системи координат, що використовуються в ROS та PX4, відрізняються.
| Frame | PX4 | ROS |
|---|---|---|
| Body | FRD (X Forward, Y Right, Z Down) | FLU (X Forward, Y Left, Z Up) |
| World | FRD or NED (X North, Y East, Z Down) | FLU or ENU (X East, Y North, Z Up) |
TIP
Дивіться REP105: Системи координат для мобільних платформ для отримання додаткової інформації про системи координат ROS.
Обидві системи координат показані на зображенні нижче (FRD зліва / FLU справа).
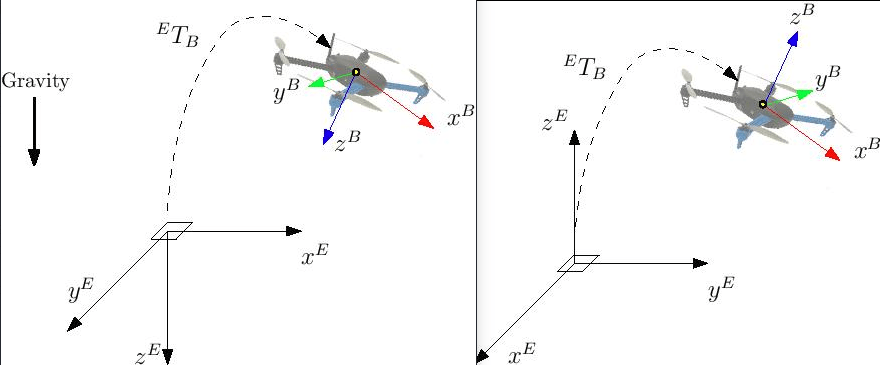
Конвенції FRD (NED) приймаються на всі теми PX4, якщо явно не вказано в відповідному визначенні повідомлення. Отже, вузли ROS 2, які хочуть співпрацювати з PX4, повинні дбати про конвенції кадрів.
Для повороту вектора з ENU на NED потрібно виконати дві основні обертання:
- спочатку обертання на кут pi/2 навколо вісі
Z(вгору), - потім обертання на кут пі навколо вісі
X(старий схід/новий північ).
- спочатку обертання на кут pi/2 навколо вісі
Для повороту вектора з NED на ENU потрібно виконати дві основні обертання:
- спочатку обертання на кут pi/2 навколо вісі
Z(вниз), - потім обертання на кут пі навколо вісі
X(старий північ/новий схід). Зверніть увагу, що дві отримані операції математично еквівалентні.
- спочатку обертання на кут pi/2 навколо вісі
Для обертання вектора з FLU на FRD достатньо обертання навколо вісі
X(передньої) на пі.Для обертання вектора з FRD на FLU достатньо обертання на пі радіан навколо вісі
X(передній).
Приклади векторів, які потребують обертання:
- усі поля в повідомленні TrajectorySetpoint; конвертація ENU в NED необхідна перед їхнім відправленням.
- всі поля в повідомленні VehicleThrustSetpoint; потрібно виконати конвертацію з FLU в FRD перед їх відправленням.
Подібно до векторів, також кватерніони, що представляють відношення транспортного засобу (тіло) відносно. світова рамка потребує конвертації.
PX4/px4_ros_com надає спільну бібліотеку frame_transforms для легкого виконання таких перетворень.
Синхронізація часу ROS, Gazebo та PX4
За замовчуванням синхронізація часу між ROS 2 та PX4 автоматично керується проміжним ПЗ uXRCE-DDS, а статистика синхронізації часу доступна при прослуховуванні мостової теми /fmu/out/timesync_status. Коли клієнт uXRCE-DDS працює на контролері польоту, а агент працює на супутниковому комп'ютері, це є бажана поведінка, оскільки зміщення часу, дрейф часу та затримка у комунікації обчислюються та автоматично компенсуються.
Для симуляцій Gazebo PX4 використовує тему Gazebo /clock як джерело часу замість. Цей годинник завжди трохи не синхронізований відносно. годинник операційної системи (фактор реального часу ніколи не є точно один) і він може навіть працювати набагато швидше або повільніше залежно від [переваг користувача](http://sdformat. org/spec? elem=physics&ver=1.9). Зверніть увагу, що це відрізняється від процедури симуляційного блокування, яка була прийнята з Gazebo Classic.
Користувачі ROS2 мають дві можливості щодо джерела часу їх вузлів.
Вузли ROS2 використовують годинник ОС як джерело часу
Цей сценарій, який розглядається на цій сторінці та в керівництві offboard_control, також є стандартною поведінкою вузлів ROS2. Годинник ОС діє як джерело часу, тому його можна використовувати лише тоді, коли фактор реального часу симуляції дуже близький до одиниці. Часовий синхронізатор клієнта uXRCE-DDS потім з'єднує годинник ОС на стороні ROS2 з годинником Gazebo на стороні PX4. Користувачеві не потрібно вживати жодних подальших заходів.
Вузли ROS2 використовують годинник Gazebo як джерело часу
У цьому сценарії ROS2 також використовує тему Gazebo /clock як джерело часу. Цей підхід має сенс, якщо симуляція Gazebo працює з коефіцієнтом реального часу, відмінним від одиниці, або якщо ROS2 потрібно безпосередньо взаємодіяти з Gazebo. На стороні ROS2 пряме взаємодія з Gazebo досягається за допомогою пакету ros_gz_bridge з репозиторію ros_gz. Прочитайте repo та package READMEs, щоб дізнатися правильну версію, яка повинна бути встановлена в залежності від вашої версії ROS2 та Gazebo.
Якщо пакет встановлено та джерело підключено, вузол parameter_bridge надає можливості мостування і може бути використаний для створення одностороннього моста /clock:
sh
ros2 run ros_gz_bridge parameter_bridge /clock@rosgraph_msgs/msg/Clock[gz.msgs.ClockНа цьому етапі кожному вузлу ROS2 необхідно бути інструкцією використовувати новостворену тему /clock як джерело часу замість ОС, це робиться шляхом встановлення параметра use_sim_time (кожного вузла) на true (див. ROS clock and Time design).
Це завершує внесені зміни, необхідні на стороні ROS2. На стороні PX4 вам потрібно лише зупинити синхронізацію часу uXRCE-DDS, встановивши параметр UXRCE_DDS_SYNCT на false. Таким чином, Gazebo буде діяти як основний і єдиний джерело часу як для ROS2, так і для PX4.
Приклади програм ROS 2
Слухач ROS 2
Приклади слухачів ROS 2 у репозиторії px4_ros_com демонструють, як писати вузли ROS для прослуховування тем, що публікуються PX4.
Тут ми розглядаємо вузол sensor_combined_listener.cpp у папці px4_ros_com/src/examples/listeners, який підписується на повідомлення SensorCombined.
Побудуйте робоче середовище ROS 2 показує, як побудувати та запустити цей приклад.
Спочатку код імпортує бібліотеки C++, необхідні для взаємодії з проміжним програмним забезпеченням ROS 2 та файл заголовка для повідомлення SensorCombined, на яке підписується вузол:
cpp
#include <rclcpp/rclcpp.hpp>
#include <px4_msgs/msg/sensor_combined.hpp>Потім він створює клас SensorCombinedListener, який успадковує загальний базовий клас rclcpp::Node.
cpp
/**
* @brief Sensor Combined uORB topic data callback
*/
class SensorCombinedListener : public rclcpp::Node
{Це створює функцію зворотного виклику для отримання повідомлень uORB SensorCombined (тепер як повідомлення micro XRCE-DDS) та виводить вміст полів повідомлення кожного разу, коли повідомлення отримано.
cpp
public:
explicit SensorCombinedListener() : Node("sensor_combined_listener")
{
rmw_qos_profile_t qos_profile = rmw_qos_profile_sensor_data;
auto qos = rclcpp::QoS(rclcpp::QoSInitialization(qos_profile.history, 5), qos_profile);
subscription_ = this->create_subscription<px4_msgs::msg::SensorCombined>("/fmu/out/sensor_combined", qos,
[this](const px4_msgs::msg::SensorCombined::UniquePtr msg) {
std::cout << "\n\n\n\n\n\n\n\n\n\n\n\n\n\n\n\n\n\n\n\n\n\n\n\n";
std::cout << "RECEIVED SENSOR COMBINED DATA" << std::endl;
std::cout << "=============================" << std::endl;
std::cout << "ts: " << msg->timestamp << std::endl;
std::cout << "gyro_rad[0]: " << msg->gyro_rad[0] << std::endl;
std::cout << "gyro_rad[1]: " << msg->gyro_rad[1] << std::endl;
std::cout << "gyro_rad[2]: " << msg->gyro_rad[2] << std::endl;
std::cout << "gyro_integral_dt: " << msg->gyro_integral_dt << std::endl;
std::cout << "accelerometer_timestamp_relative: " << msg->accelerometer_timestamp_relative << std::endl;
std::cout << "accelerometer_m_s2[0]: " << msg->accelerometer_m_s2[0] << std::endl;
std::cout << "accelerometer_m_s2[1]: " << msg->accelerometer_m_s2[1] << std::endl;
std::cout << "accelerometer_m_s2[2]: " << msg->accelerometer_m_s2[2] << std::endl;
std::cout << "accelerometer_integral_dt: " << msg->accelerometer_integral_dt << std::endl;
});
}Підписка встановлює профіль QoS на основі rmw_qos_profile_sensor_data. Це потрібно, оскільки типовий профіль якості обслуговування ROS 2 для підписників несумісний з профілем PX4 для видавців. Для отримання додаткової інформації див. : ROS 2 Налаштування QoS для підписника,
Рядки нижче створюють виробника для теми uORB SensorCombined, яка може бути зіставлена з одним або кількома сумісними підписниками ROS 2 для теми ROS 2 fmu/sensor_combined/out.
cpp
private:
rclcpp::Subscription<px4_msgs::msg::SensorCombined>::SharedPtr subscription_;
};Інстанціювання класу SensorCombinedListener як вузла ROS виконується у функції main.
cpp
int main(int argc, char *argv[])
{
std::cout << "Starting sensor_combined listener node..." << std::endl;
setvbuf(stdout, NULL, _IONBF, BUFSIZ);
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared<SensorCombinedListener>());
rclcpp::shutdown();
return 0;
}Цей конкретний приклад має пов'язаний файл запуску за посиланням launch/sensor_combined_listener.launch.py. Це дозволяє запускати його за допомогою команди ros2 launch.
ROS 2 Advertiser
Вузол відправника ROS 2 публікує дані в мережу DDS/RTPS (і, отже, в автопілот PX4).
Беручи як приклад debug_vect_advertiser.cpp під px4_ros_com/src/advertisers, спочатку ми імпортуємо необхідні заголовки, включаючи заголовок повідомлення debug_vect.
cpp
#include <chrono>
#include <rclcpp/rclcpp.hpp>
#include <px4_msgs/msg/debug_vect.hpp>
using namespace std::chrono_literals;Потім код створює клас DebugVectAdvertiser, який успадковує загальний базовий клас rclcpp::Node.
cpp
class DebugVectAdvertiser : public rclcpp::Node
{Код нижче створює функцію для відправлення повідомлень. Повідомлення надсилаються на основі виклику за часом, який надсилає два повідомлення на секунду за таймером.
cpp
public:
DebugVectAdvertiser() : Node("debug_vect_advertiser") {
publisher_ = this->create_publisher<px4_msgs::msg::DebugVect>("fmu/debug_vect/in", 10);
auto timer_callback =
[this]()->void {
auto debug_vect = px4_msgs::msg::DebugVect();
debug_vect.timestamp = std::chrono::time_point_cast<std::chrono::microseconds>(std::chrono::steady_clock::now()).time_since_epoch().count();
std::string name = "test";
std::copy(name.begin(), name.end(), debug_vect.name.begin());
debug_vect.x = 1.0;
debug_vect.y = 2.0;
debug_vect.z = 3.0;
RCLCPP_INFO(this->get_logger(), "\033[97m Publishing debug_vect: time: %llu x: %f y: %f z: %f \033[0m",
debug_vect.timestamp, debug_vect.x, debug_vect.y, debug_vect.z);
this->publisher_->publish(debug_vect);
};
timer_ = this->create_wall_timer(500ms, timer_callback);
}
private:
rclcpp::TimerBase::SharedPtr timer_;
rclcpp::Publisher<px4_msgs::msg::DebugVect>::SharedPtr publisher_;
};Інстанціювання класу DebugVectAdvertiser як вузла ROS виконується у функції main.
cpp
int main(int argc, char *argv[])
{
std::cout << "Starting debug_vect advertiser node..." << std::endl;
setvbuf(stdout, NULL, _IONBF, BUFSIZ);
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared<DebugVectAdvertiser>());
rclcpp::shutdown();
return 0;
}Offboard Control
Для повного прикладу посилання на те, як використовувати керування Offboard з PX4, див. : Приклад керування Offboard ROS 2.
Використання апаратної плати керування польотом
ROS 2 з PX4, що працює на пульті керування польотом, майже те саме, що й працювати з PX4 на симуляторі. Єдине відмінність полягає в тому, що потрібно запустити як агента, так і клієнта, з параметрами, відповідними для каналу зв'язку.
Для отримання додаткової інформації дивіться Початок uXRCE-DDS.
Користувацькі теми uORB
ROS 2 потребує мати ті самі визначення повідомлень, які використовувалися для створення модуля клієнта uXRCE-DDS в прошивці PX4, щоб інтерпретувати повідомлення. Визначення зберігаються в пакеті інтерфейсу ROS 2 PX4/px4_msgs і автоматично синхронізуються CI на гілках main та release. Зверніть увагу, що всі повідомлення з вихідного коду PX4 присутні в репозиторії, але лише ті, які перелічені в dds_topics.yaml, будуть доступні як теми ROS 2. Тому
Якщо ви використовуєте основну або випускову версію PX4, ви можете отримати визначення повідомлень, клонуючи пакунок інтерфейсу PX4/px4_msgs у вашу робочу область.
Якщо ви створюєте або змінюєте повідомлення uORB, вам потрібно вручну оновити повідомлення у вашому робочому просторі з дерева джерела PX4. Загалом це означає, що ви мали б оновити dds_topics.yaml, клонувати пакет інтерфейсу, а потім вручну синхронізувати його, копіюючи нові/змінені визначення повідомлень з PX4-Autopilot/msg до його папок
msg. Припускаючи, що PX4-Autopilot знаходиться у вашій домашній директорії~, тоді якpx4_msgsзнаходиться у~/px4_ros_com/src/, то команда може бути:shrm ~/px4_ros_com/src/px4_msgs/msg/*.msg cp ~/PX4-Autopilot/mgs/*.msg ~/px4_ros_com/src/px4_msgs/msg/Технічно, dds_topics.yaml повністю визначає відношення між темами PX4 uORB та повідомленнями ROS 2. Для отримання додаткової інформації див. uXRCE-DDS > DDS Topics YAML.
:::
Налаштування простору назв теми
Спеціальні простори імен тем можуть бути застосовані на етапі збірки (зміна dds_topics.yaml) або під час виконання (корисно для операцій з кількома транспортними засобами):
- Одним із варіантів є використання опції
-nпри запуску uxrce_dds_client з командного рядка. Ця техніка може бути використана як у симуляційних, так і в реальних транспортних засобах. - Спеціальний простір імен може бути наданий для симуляцій (тільки) за допомогою встановлення змінної середовища
PX4_UXRCE_DDS_NSперед запуском симуляції.
Зміна простору імен під час виконання додасть потрібний простір імен як префікс до всіх полів topic в dds_topics.yaml. Отже, команди, подібні до:
sh
uxrce_dds_client start -n uav_1або
sh
PX4_UXRCE_DDS_NS=uav_1 make px4_sitl gz_x500згенерує теми під просторами імен:
sh
/uav_1/fmu/in/ # for subscribers
/uav_1/fmu/out/ # for publishersros2 CLI
ros2 CLI - це корисний інструмент для роботи з ROS. Ви можете використовувати його, наприклад, щоб швидко перевірити, чи публікуються теми, а також докладно їх перевірити, якщо у вас є px4_msg у робочому просторі. Команда також дозволяє вам запускати більш складні системи ROS за допомогою файлу запуску. Декілька можливостей демонструються нижче.
ros2 topic list
Використовуйте ros2 topic list, щоб переглянути список тем, доступних для ROS 2:
sh
ros2 topic listЯкщо PX4 підключений до агента, результатом буде список типів теми:
/fmu/in/obstacle_distance
/fmu/in/offboard_control_mode
/fmu/in/onboard_computer_status
...Зверніть увагу, що робочому простору не потрібно будувати з px4_msgs для успішного виконання; інформація про тип теми є частиною навантаження повідомлення.
ros2 topic echo
Використовуйте ros2 topic echo, щоб показати деталі певної теми.
На відміну від ros2 topic list, для цієї роботи вам потрібно знаходитися в робочому просторі, який побудував px4_msgs та джерело local_setup.bash, щоб ROS міг інтерпретувати повідомлення.
sh
ros2 topic echo /fmu/out/vehicle_statusКоманда виведе деталі теми під час оновлення.
---
timestamp: 1675931593364359
armed_time: 0
takeoff_time: 0
arming_state: 1
latest_arming_reason: 0
latest_disarming_reason: 0
nav_state_timestamp: 3296000
nav_state_user_intention: 4
nav_state: 4
failure_detector_status: 0
hil_state: 0
...
---ros2 topic hz
Ви можете отримати статистику про швидкість повідомлень, використовуючи ros2 topic hz. Наприклад, щоб отримати ставки для SensorCombined:
ros2 topic hz /fmu/out/sensor_combinedВихід буде виглядати приблизно так:
sh
average rate: 248.187
min: 0.000s max: 0.012s std dev: 0.00147s window: 2724
average rate: 248.006
min: 0.000s max: 0.012s std dev: 0.00147s window: 2972
average rate: 247.330
min: 0.000s max: 0.012s std dev: 0.00148s window: 3212
average rate: 247.497
min: 0.000s max: 0.012s std dev: 0.00149s window: 3464
average rate: 247.458
min: 0.000s max: 0.012s std dev: 0.00149s window: 3712
average rate: 247.485
min: 0.000s max: 0.012s std dev: 0.00148s window: 3960ros2 launch
Команда ros2 launch використовується для запуску файлу запуску ROS 2. Наприклад, вище ми використовували ros2 launch px4_ros_com sensor_combined_listener.launch.py для запуску прикладу слухача.
Вам не потрібно мати файл запуску, але вони дуже корисні, якщо у вас складна система ROS 2, яка потребує запуску кількох компонентів.
Для отримання інформації про файли запуску див. Посібники ROS 2 > Створення файлів запуску
Відстеження проблем
Відсутні залежності
Стандартна установка повинна включати всі необхідні інструменти для ROS 2.
Якщо щось відсутнє, його можна додати окремо:
Інструменти збірки
colconповинні бути в інструментах розробки. Можна встановити за допомогою:shsudo apt install python3-colcon-common-extensionsБібліотеку Eigen3, яку використовує бібліотека трансформацій, повинно бути в обох пакунків: desktop та base. Воно повинно бути встановлено, як показано:
:::
::::
Додаткова інформація
- ROS 2 у PX4: Технічні деталі безперервного переходу до XRCE-DDS - Пабло Гаррідо та Нуно Маркес (youtube)
- Реалізації проміжного ПЗ DDS та ROS