Системи радіо керування
Системи радіо керування (РК) використовуються для ручного керування рухомим засобом з переносного контролера РК. У цьому розділі наведено огляд того, як працює RC система, як вибрати відповідну радіосистему для вашого засобу, і як під'єднати її до політного контролера.
PX4 також може керуватися вручну за допомогою Джойстика або подібного до геймпаду контролера, це відрізняється від керування за допомогою RC! Параметр COM_RC_IN_MODE може бути встановлено для вибору режиму керування за допомогою RC системи (за замовчуванням), джойстика, обома або жодним з них. :::
INFO
PX4 не потребує системи дистанційного керування для автономних режимів польоту.
Як працюють системи радіо керування?
Система радіокерування має наземний пристрій дистанційного керування, що використовується оператором для керування засобом. Пульт має органи управління, які використовуються для задання параметрів руху засобу (наприклад швидкість, напрямок, прискорення, рискання, тангаж, крен тощо), а також для увімкнення режимів польоту автопілота (наприклад зліт, приземлення, повернення на землю після втрати керування, місія тощо). На RC де присутня телеметрія, пристрій дистанційного керування також може отримувати та показувати інформацію про рухомий засіб, таку як рівень заряду батареї, режим польоту та попередження.

Наземний RC контролер містить радіомодуль, який пов'язаний із (сумісним) радіомодулем у рухомому засобі та спілкується з ним. Пристрій радіомодуля на апараті під'єднано до політного контролера. Політний контролер визначає як інтерпретувати команди в залежності від поточного режиму польоту автопілота і відповідно керує моторами та приводами апарату.
Наземний та розташований на апараті радіомодулі називаються передавачем та приймачем відповідно (навіть якщо вони підтримують двосторонню передачу) та загалом називаються пара передавач/приймач. RC контролер та включений в нього радіомодуль часто називають просто "передавачем". :::
Важлива якість RC системи це кількість "каналів", яку вона підтримує. Кількість каналів визначає скільки різних фізичних елементів керування на пульті можна використовувати для відправлення команд рухомому засобу (наприклад скільки перемикачів, стіків керування можна використовувати).
Літальний апарат повинен використовувати систему, яка підтримує щонайменше 4 канали (для крену, тангажу, рискання, тяги). Наземні транспортні засоби потребують не менше двох каналів (кермо + газ). Передавач на 8 або 16 каналів забезпечує додаткові канали, які використовуються для керування іншими механізмами або активації інших режимів польоту які надає автопілот.
Типи пристроїв дистанційного керування
Пристрої керування для літальних апаратів
Найпопулярніша форма пристрою керування для БПЛА показана нижче. Як можна бачити, він має окремі стіки керування для крену/тангажу та для тяги/рискання (тобто літальний апарат потребує принаймні 4 канали).
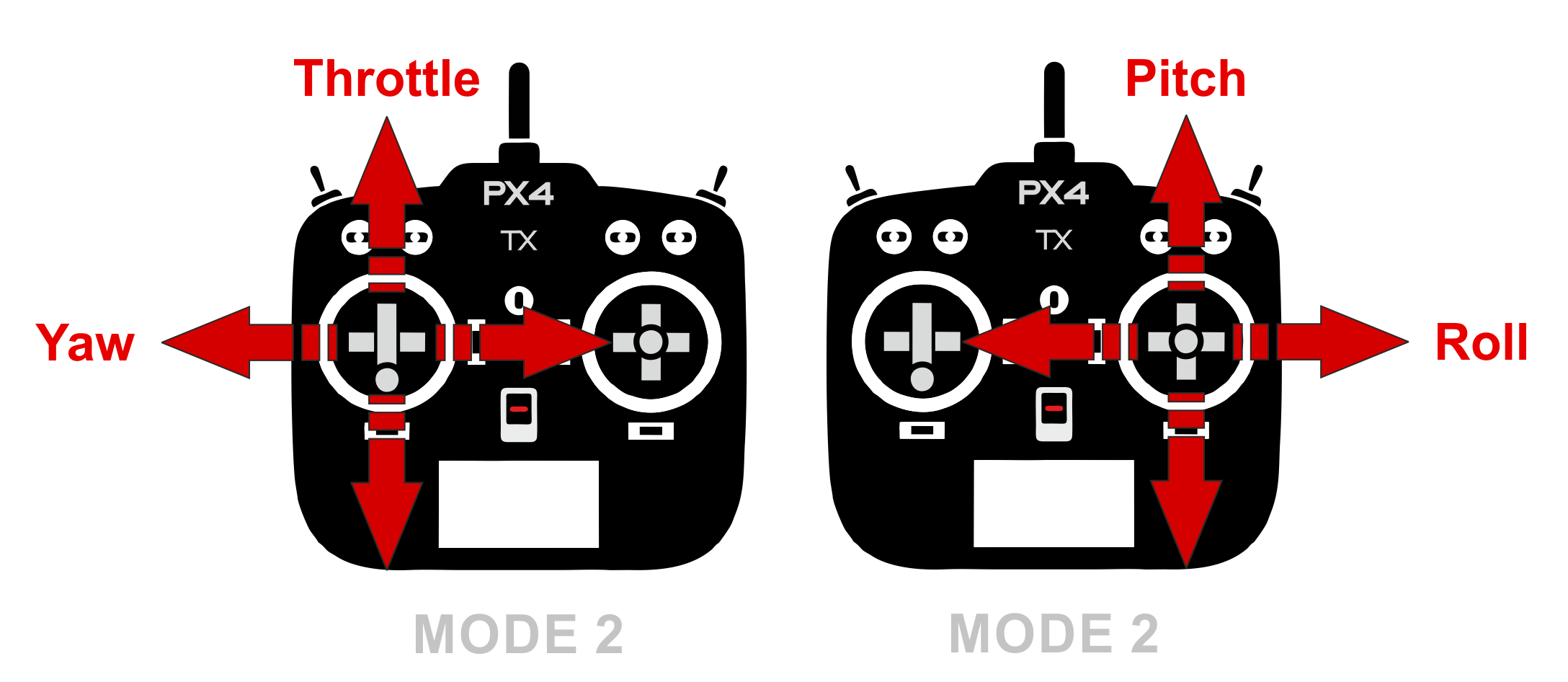
Існує багато можливих розташувань для стіків керування, перемикачів і т. ін. Найпоширеніші розташування мають власний номер "режиму". Режим 1 та Режим 2 (показано нижче) відрізняються тільки розташуванням газу.
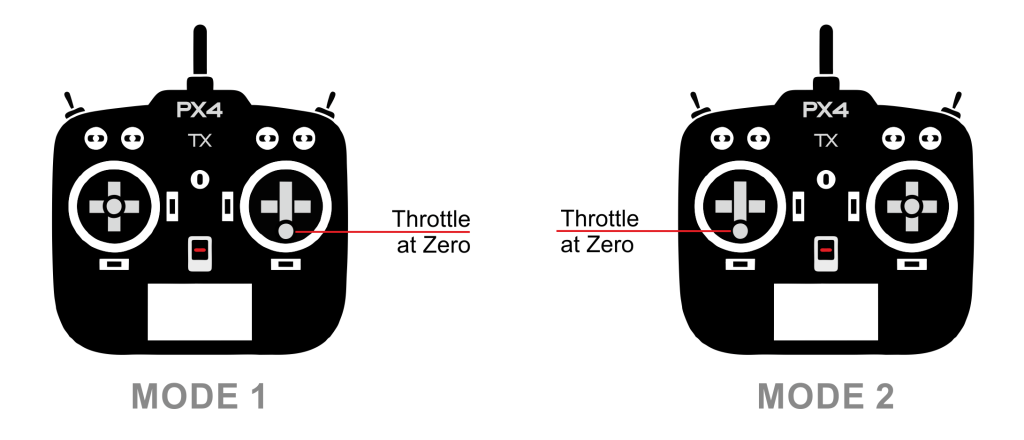
Вибір режиму значною мірою обумовлений смаком (Режим 2 найбільш популярний). :::
Пристрої керування для наземних засобів
Безпілотний наземний транспортний засіб (UGV)/автомобіль мінімально потребує передавача з 2 каналами для того, щоб передавати дані для керування та швидкості. Часто передавачі задають ці дані за допомогою колеса та тригера, двох одновісних стіків керування або одного двовісного стіку.
Вам ніщо не заважає користуватися додатковими каналами або механізмами керування і це може бути дуже корисно для залучення додаткових приводів та режимів автопілота.
Вибір компонентів RC системи
Вам необхідно буде обрати пару передача/приймача сумісних між собою. На додаток приймачі мають бути сумісні з PX4 та апаратним забезпеченням політного контролера.
Сумісні радіосистеми часто продаються разом. Наприклад популярна комбінація FrSky Taranis X9D та FrSky X8R.
Пари передавач/приймач
Один з найбільш популярних RC пристроїв - це Fry Taranis X9D. Він має внутрішній передавач, який може бути використано одразу з рекомендованим приймачами FrSky X4R-SB (S-BUS, низька затримка) або X4R (PPM-Sum, застарілий). Він також має спеціальний роз'єм для радіо передавача та прошивку з відкритим кодом OpenTX яку можна налаштувати.
Дистанційний блок може відображати телеметрію автомобіля під час використання з FrSky або TBS Crossfire радіо-модулів. :::
Інші популярні пари передавач/приймач
- Пульт Turnigy з, наприклад, парою передавач/приймач FrSky.
- Передавачі Futaba та сумісні S-Bus приймачі Futaba.
- Передавачі на далеку відстань у діапазоні ~900МГц з низькою затримкою: набори "Team Black Sheep Crossfire" або "Crossfire Micro" із сумісним пультом (наприклад Taranis)
- Передавач на далеку відстань у діапазоні ~433МГц: набір ImmersionRC EzUHF із сумісним пультом (наприклад Taranis)
PX4-сумісні приймачі
На додачу до пари передавач/приймач, приймач також повинен бути сумісним з PX4 та політним контролером.
PX4 та Pixhawk були перевірені з:
- Всіма приймачами Spektrum DSM RC
- Всіма приймачами Futaba S.BUS та S.BUS2
- Всіма моделями FrSky PPM та S.Bus
- Graupner HoTT
- Усіма PPM моделями від інших виробників
- Приймачами TBS Crossfire/Express LRS за допомогою CRSF телеметрії (UART з'єднання).
Підключення приймачів
Як загальне правило: приймачі з'єднуються з політним контролером використовуючи порт відповідного протоколу що ним підтримується:
- Приймачі Spektrum і DSM повинні підключатися до входу SPKT/DSM.
- Graupner HoTT приймач: SUMD вивід повинен під'єднуватися до SPKT/DSM входу.
- PPM-Sum та S.BUS приймачі повинні під'єднуватися напряму до RC штирків заземлення, живлення та сигналу (типово позначені як RC або RCIN)
- PPM приймачі, які мають окремі дроти для кожного каналу повинні підключатися до каналу RCIN через PPM перетворювач на зразок цього (PPM-Sum приймачі використовують єдиний дріт для всіх каналів).
Інструкції щодо з'єднання із конкретним політним контролером надаються в їх посібниках швидкого старту (наприклад CUAV Pixhawk V6X Швидкий старт із підключення: радіо керування або Holybro Pixhawk 6X Швидкий старт із підключення: радіо керування).
TIP
Дивіться посібник з налаштування політного контролера від виробника для додаткової інформації.
Прив'язка передавача/приймача
Перед тим як ви зможете відкалібрувати або використати радіо систему ви повинні прив'язати приймач та передавач, щоб вони спілкувались тільки між собою. Процес прив'язки пари передавача та приймача залежить від апаратного забезпечення (дивіться посібник користувача для інструкцій).
Якщо ви використовуєте приймач Spektrum ви можете встановити його у режим прив'язки в QGroundControl: Radio Setup > Spectrum Bind.
Налаштування поведінки при втраті сигналу
У RC приймачів є різні способи визначення втрати сигналу:
- Відсутній вивід (автоматично виявляється PX4)
- Виводиться низький рівень газу (можна налаштувати PX4 для виявлення цього).
- Виводиться останній отриманий сигнал (PX4 не може впоратися з цим випадком!)
Виберіть приймач, який може нічого не виводити коли RC втрачається (бажано) або виводить низьке значення газу. Ця поведінка може вимагати налаштування апаратного забезпечення приймача (перевірте інструкцію користувача).
Для отримання додаткової інформації див. Налаштування радіо керування > Визначення втрати RC.
Пов'язані теми
- Налаштування радіо керування - налаштування вашого радіо з PX4.
- Ручні польоти - дізнайтеся як літати з пультом дистанційного керування.
- TBS Crossfire (CRSF) телеметрія
- FrSky телеметрія