Hardware in the Loop Simulation (HITL)
HITL
is community supported and maintained. It may or may not work with current versions of PX4.
See Toolchain Installation for information about the environments and tools supported by the core development team.
HITL(Hardware-in-the-Loop)은 일반 PX4 펌웨어가 실제 비행 콘트롤러 하드웨어에서 실행되는 시뮬레이션 모드입니다. 이 접근 방식은 실제 하드웨어에서 대부분의 실제 비행 코드를 테스트할 수 있습니다.
PX4 supports HITL for multicopters (using jMAVSim or Gazebo Classic) and VTOL (using Gazebo Classic).
HITL 호환 기체
현재 호환 가능한 기체와 시뮬레이터는 아래와 같습니다.
| 기체 | SYS_AUTOSTART | Gazebo Classic | jMAVSim |
|---|---|---|---|
| HIL 쿼드콥터 X | 1001 | 예 | 예 |
| HIL 표준 VTOL QuadPlane | 1002 | 예 | |
| 일반 쿼드콥터 x 콥터 | 4001 | 예 | 예 |
HITL 시뮬레이션 환경
HITL(Hardware-in-the-Loop) 시뮬레이션을 사용하여, 일반 PX4 펌웨어가 실제 하드웨어에서 실행됩니다. JMAVSim or Gazebo Classic (running on a development computer) are connected to the flight controller hardware via USB/UART. The simulator acts as gateway to share MAVLink data between PX4 and QGroundControl.
The simulator can also be connected via UDP if the flight controller has networking support and uses a stable, low-latency connection (e.g. a wired Ethernet connection - WiFi is usually not sufficiently reliable). 예를 들어, 이 설정은 이더넷으로 컴퓨터에 연결된 라즈베리파이에서 실행되는 PX4로 테스트되었습니다(jMAVSim 실행 명령이 포함된 시작 설정은 여기를 참고).
아래 다이어그램은 시뮬레이션 환경을 나타냅니다.
- A HITL configuration is selected (via QGroundControl) that doesn't start any real sensors.
- jMAVSim or Gazebo Classic are connected to the flight controller via USB.
- The simulator is connected to QGroundControl via UDP and bridges its MAVLink messages to PX4.
- Gazebo Classic and jMAVSim can also connect to an offboard API and bridge MAVLink messages to PX4.
- (Optional) A serial connection can be used to connect Joystick/Gamepad hardware via QGroundControl.

HITL 대 SITL
SITL은 시뮬레이션 환경의 컴퓨터에서 실행되며, 해당 환경에서 제작된 펌웨어를 사용합니다. 시뮬레이터에서 가공의 환경 데이터를 제공하는 시뮬레이션 드라이버 이외의 시스템은 정상적으로 작동합니다.
이와 대조적으로, HITL은 일반 하드웨어의 "HITL 모드"에서 일반 PX4 펌웨어를 실행합니다. 시뮬레이션 데이터는 SITL과 다른 지점에서 시스템에 입력됩니다. 커맨더 및 센서와 같은 핵심 모듈에는 시작 시 정상적인 기능 중 일부를 우회하는 HITL 모드가 있습니다.
요약하면, HITL은 표준 펌웨어를 사용하여 실제 하드웨어에서 PX4를 실행하고, SITL은 실제로 더 많은 표준 시스템 코드를 실행합니다.
HITL 설정
PX4 설정
Connect the autopilot directly to QGroundControl via USB.
HITL 모드를 활성화합니다.
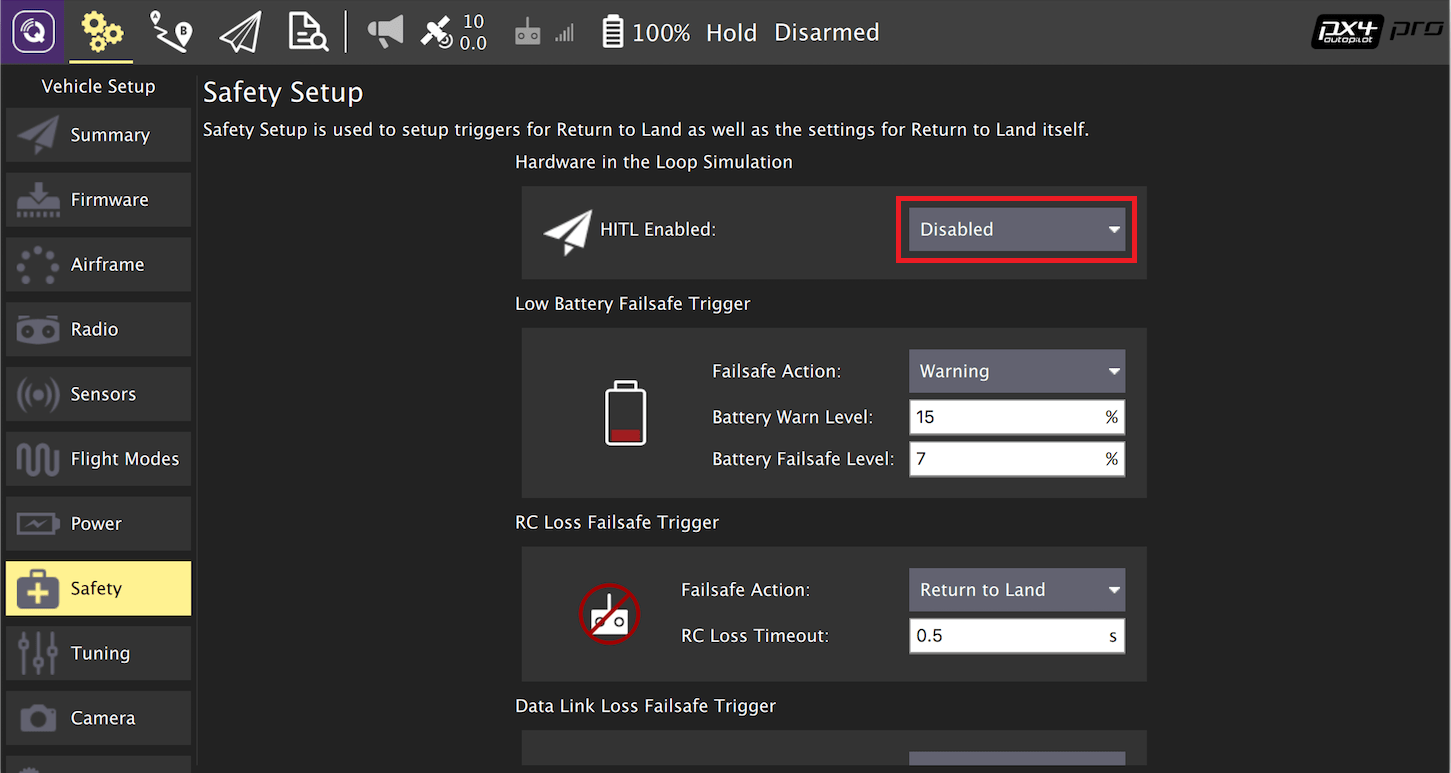
설정 열기 > 안전 섹션을 오픈합니다.
Enable HITL mode by selecting Enabled from the HITL Enabled list:
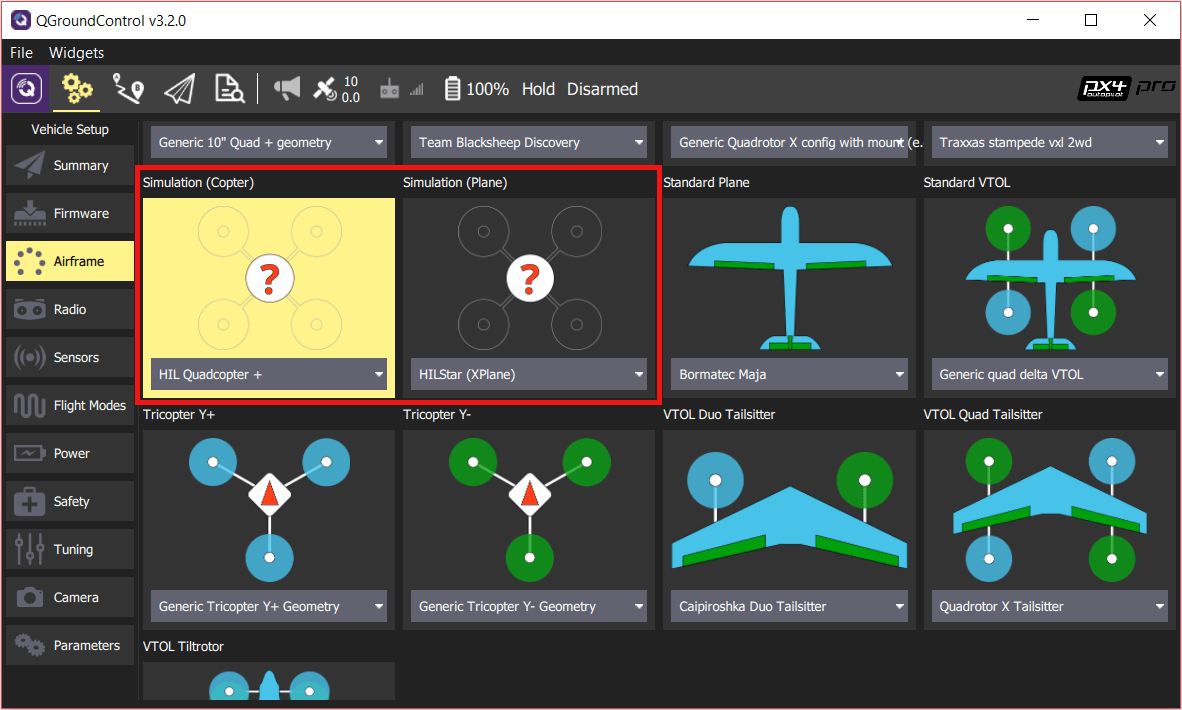
기체를 선택합니다.
설정 > 기체를 오픈합니다.
테스트할 호환 기체를 선택합니다. Then click Apply and Restart on top-right of the Airframe Setup page.
필요한 경우 RC 또는 조이스틱을 보정합니다.
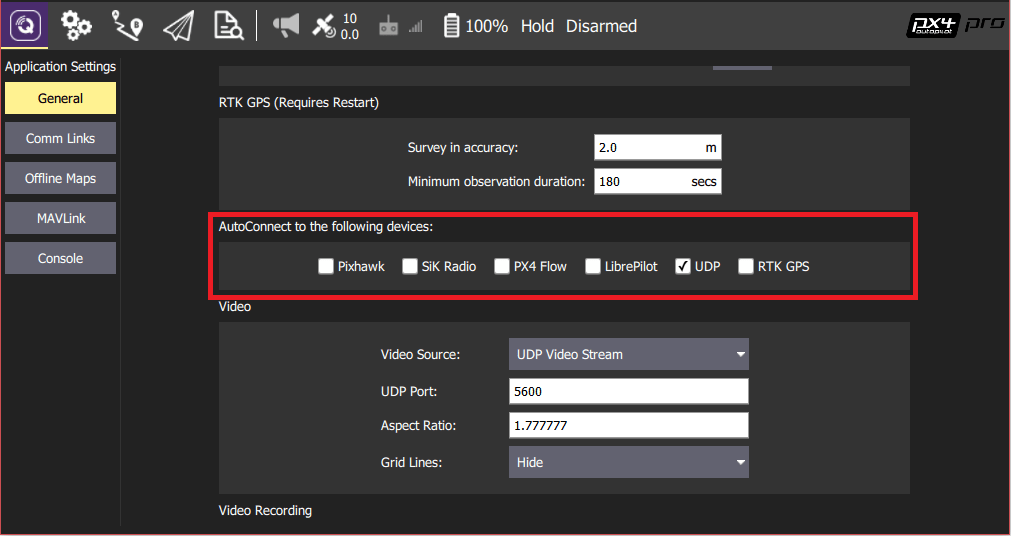
UDP를 설정합니다.
Under the General tab of the settings menu, uncheck all AutoConnect boxes except for UDP.
(선택 사항) 조이스틱과 안정장치를 설정합니다. RC 리모콘 송신기 대신 조이스틱을 사용하려면 이 매개변수를 설정하십시오.
- COM_RC_IN_MODE를 "조이스틱/RC 검사 없음"으로 변경합니다. 이것은 조이스틱 입력을 허용하고, RC 입력을 비활성화합니다.
- NAV_RCL_ACT를 '사용 안 함'으로 설정합니다. 무선 제어로 HITL을 실행하지 않으면, RC 안전장치가 간섭하지 않습니다.
TIP
The QGroundControl User Guide also has instructions on Joystick and Virtual Joystick setup.
Once configuration is complete, close QGroundControl and disconnect the flight controller hardware from the computer.
시뮬레이터별 설정
다음 섹션을 참고하여 특정 시뮬레이터에 대하여 설정하십시오.
Gazebo Classic
Make sure QGroundControl is not running!
Build PX4 with Gazebo Classic (in order to build the Gazebo Classic plugins).
shcd <Firmware_clone> DONT_RUN=1 make px4_sitl_default gazebo-classicOpen the vehicle model's sdf file (e.g. Tools/simulation/gazebo-classic/sitl_gazebo-classic/models/iris_hitl/iris_hitl.sdf).
필요한 경우
serialDevice매개변수(/dev/ttyACM0)를 변경합니다.The serial device depends on what port is used to connect the vehicle to the computer (this is usually
/dev/ttyACM0). Ubuntu를 확인하는 쉬운 방법은 자동조종장치를 연결후, 터미널에서dmesg | grep "tty"를 실행합니다.. 올바른 장치가 마지막에 표시됩니다.
:::
환경 변수를 설정합니다.
shsource Tools/simulation/gazebo-classic/setup_gazebo.bash $(pwd) $(pwd)/build/px4_sitl_defaultand run Gazebo Classic in HITL mode:
shgazebo Tools/simulation/gazebo-classic/sitl_gazebo-classic/worlds/hitl_iris.worldStart QGroundControl. It should autoconnect to PX4 and Gazebo Classic.
jMAVSim(쿼드콥터 전용)
Make sure QGroundControl is not running!
비행 콘트롤러를 컴퓨터에 연결하고, 부팅시까지 기다립니다.
jMAVSim를 HITL 모드에서 실행:
sh./Tools/simulation/jmavsim/jmavsim_run.sh -q -s -d /dev/ttyACM0 -b 921600 -r 250Replace the serial port name
/dev/ttyACM0as appropriate. MacOS에서 이 포트는/dev/tty.usbmodem1입니다. Windows(Cygwin 포함)에서는 COM1 또는 다른 포트입니다. Windows 장치 관리자에서 확인하십시오.
:::
- Start QGroundControl. PX4와 jMAVSim에 자동으로 연결되어야 합니다.
HITL에서 자율 임무 비행
You should be able to use QGroundControl to run missions and otherwise control the vehicle.