Crazyflie 2.1
WARNING
PX4 does not manufacture this (or any) autopilot. Contact the manufacturer for hardware support or compliance issues.
WARNING
Crazyflie 2.1 is only able to fly in Manual/Stabilized mode.
The Crazyflie line of micro quads was created by Bitcraze AB. An overview of the Crazyflie 2.1 can be found here.

Quick Summary
INFO
The main hardware documentation is here
- Main System-on-Chip: STM32F405RG
- CPU: 168 MHz ARM Cortex M4 with single-precision FPU
- RAM: 192 KB SRAM
- nRF51822 radio and power management MCU
- BMI088 3 axis accelerometer / gyroscope
- BMP388 high precision pressure sensor
- uUSB connector
- On-board LiPo charger with 100mA, 500mA and 980mA modes available
- Full speed USB device interface
- Partial USB OTG capability (USB OTG present but no 5V output)
- 8KB EEPROM
Where to Buy
The vehicle can be purchased here: Crazyflie 2.1 (store.bitcraze.io)
Useful peripheral hardware includes:
- Crazyradio PA 2.4 GHz USB dongle: Wireless communication between QGroundControl and Crazyflie 2.0
- Breakout deck: Breakout expansion board for connecting new peripherals.
- Flow deck v2: Optical flow sensor and a distance sensor for altitude and position control.
- Z-ranger deck v2: Distance sensor for altitude control (same sensor as the Flow deck).
- Multi-ranger deck Multi-direction object detection
- Buzzer deck Audio feedback on system events, like low battery or charging completed.
- Breakout deck: Expansion board that gives you the ability to test new hardware easily without soldering.
- SD-card deck: High speed onboard logging to a micro SD card
- Logitech Joystick
Assemble Crazyflie 2.1
Flashing PX4
INFO
These instructions have only been tested on Ubuntu.
After setting up the PX4 development environment, follow these steps to install the PX4 Autopilot on the Crazyflie 2.1:
Download the source code of the PX4 Bootloader:
shgit clone https://github.com/PX4/Bootloader.git --recurse-submodulesNavigate into the top directory of the source code and compile it using:
shmake crazyflie21_blPut the Crazyflie 2.1 into DFU mode by following these steps:
- Ensure it is initially unpowered.
- Ensure battery is disconnected.
- Hold down the reset button (see figure below...).

- Plug into computer's USB port.
- After a second, the blue LED should start blinking and after 5 seconds should start blinking faster.
- Release button.
Install dfu-util:
shsudo apt-get update sudo apt-get install dfu-utilFlash bootloader using dfu-util and unplug Crazyflie 2.1 when done:
shsudo dfu-util -d 0483:df11 -a 0 -s 0x08000000 -D ./build/crazyflie21_bl/crazyflie21_bl.binWhen powering on the Crazyflie 2.1 the yellow LED should blink.
Download the source code of the PX4 autopilot:
shgit clone https://github.com/PX4/PX4-Autopilot.gitNavigate into the top directory of the source code and compile it using:
shcd PX4-Autopilot/ make bitcraze_crazyflie21_default uploadWhen prompted to plug in device, plug in Crazyflie 2.1. The yellow LED should start blinking indicating bootloader mode. Then the red LED should turn on indicating that the flashing process has started.
Wait for completion.
Done! Calibrate the sensors using QGroundControl.
Flashing Original Bitcraze Firmware
Download the latest Crazyflie 2.1 bootloader
Put the Crazyflie 2.1 into DFU mode by following these steps:
- Ensure it is initially unpowered.
- Ensure battery is disconnected.
- Hold down the reset button.
- Plug into computer's USB port.
- After a second, the blue LED should start blinking and after 5 seconds should start blinking faster.
- Release button.
Flash bootloader using dfu-util and unplug Crazyflie 2.1 when done:
shsudo dfu-util -d 0483:df11 -a 0 -s 0x08000000 -D cf2loader-1.0.binWhen powering on the Crazyflie 2.1 the yellow LED should blink.
Install the latest Bitcraze Crazyflie 2.1 Firmware using this tutorial.
Wireless Setup Instructions
The onboard nRF module allows connecting to the board via Bluetooth or through the proprietary 2.4GHz Nordic ESB protocol.
- A Crazyradio PA is recommended.
- To fly the Crazyflie 2.1 right away, the Crazyflie phone app is supported via Bluetooth.
Connecting via MAVLink:
Use a Crazyradio PA alongside a compatible GCS.
Download the crazyflie-lib-python source code:
shgit clone https://github.com/bitcraze/crazyflie-lib-python.git
INFO
We will use cfbridge.py to setup a wireless MAVlink communication link between Crazyflie 2.1 (flashed with PX4) and QGroundControl. Cfbridge enables QGroundControl to communicate with the crazyradio PA. The C based cfbridge is currently experiencing data loss issues, which is why we have chosen to use cfbridge.py.
Make sure you have set the udev permissions to use the USB Radio. To do this, follow the steps listed here and restart your computer.
Connect a Crazyradio PA via USB.
Build a virtual environment (local python environment) with package dependencies using the following method:
shpip install tox --userNavigate to the crazyflie-lib-python folder and type:
shmake venvActivate the virtual environment:
shsource venv/bin/activateInstall required dependencies:
shpip install cflib pip install -r requirements.txt
To connect Crazyflie 2.1 with crazyradio, launch cfbridge by following these steps:
Power off and power on Crazyflie 2.1 and wait for it to boot up.
Connect a Crazyflie radio device via USB.
Navigate to the crazyflie-lib-python folder.
Activate the environment:
shsource venv/bin/activateNavigate to the examples folder:
shcd examplesLaunch cfbridge:
shpython cfbridge.pyINFO
Cfbridge by default tries to initiate the radio link communication on channel 80 and with crazyflie address 0xE7E7E7E7E7. If you are using multiple crazyflies and/or crazyradios in the same room and want to use a different channel and/or address for each, first connect the crazyflie with QGroundControl via a USB cable and change the syslink parameters (channel, address) in QGroundControl. Next, launch the cfbridge by giving the same channel and address as the first and second arguments respectively, e.g:
python cfbridge.py 90 0x0202020202
:::
Open QGroundControl.
After using cfbridge, you can deactivate the virtualenv if you activated it by pressing
CTRL+z. Most of the time, launching cfbridge again from the same terminal doesn't connect to crazyflie, this can be solved by closing the terminal and relaunching cfbridge in a new terminal.
TIP
If you change any driver in crazyflie-lib-python or if launching cfbridge in a new terminal does not find crazyflie, you can try navigating to the crazyflie-lib-python folder and run the script below to rebuild cflib.
sh
make venvINFO
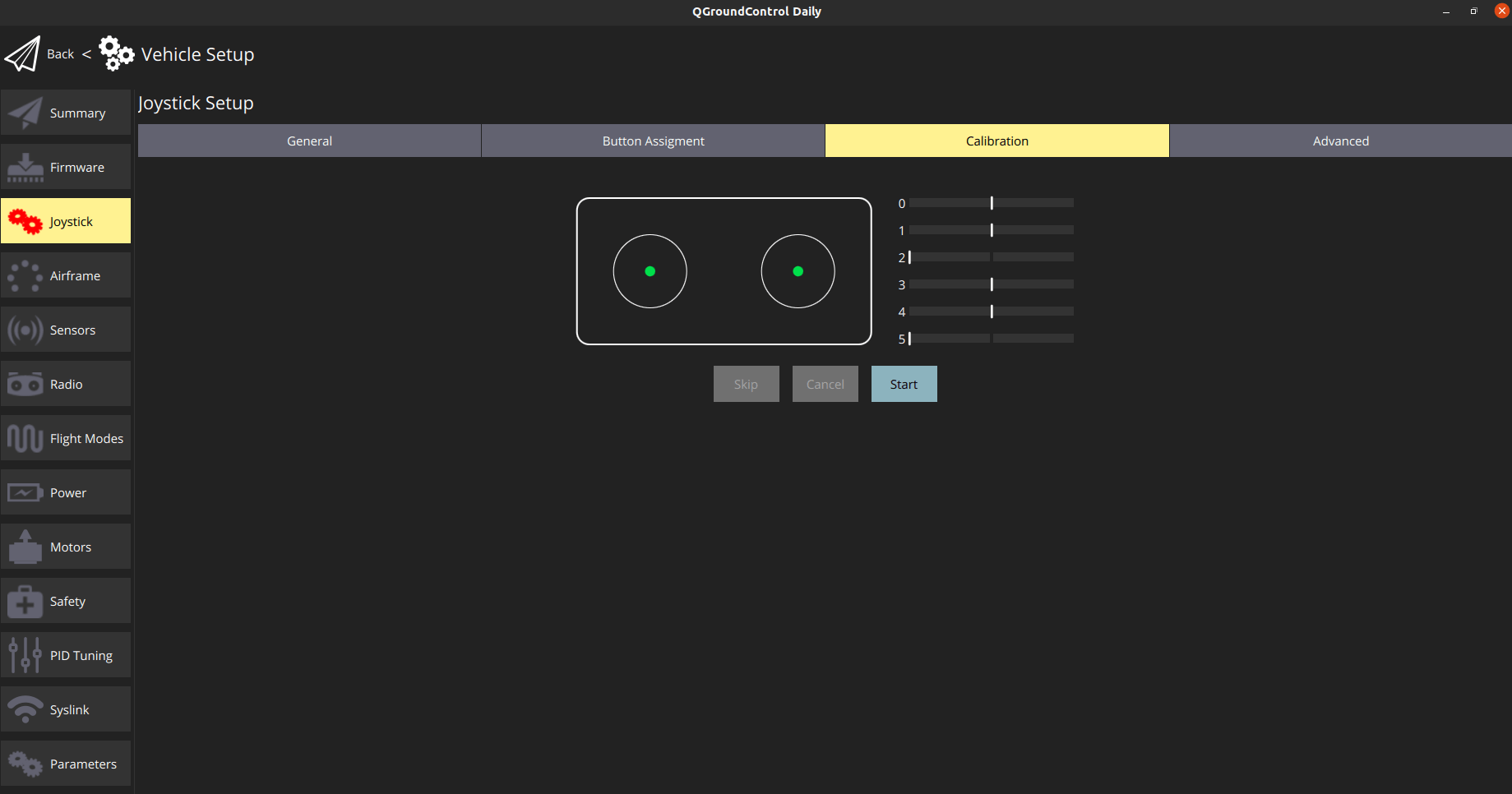
The Joystick menu in QGC, only appears after you connect the controller to the PC (for example a Playstation 3 controller).
Hardware Setup
Crazyflie 2.1 is only able to fly in Stabilized mode.
In order to log flight details, you can mount SD card deck on top of crazyflie as shown below:

Using FrSky Taranis RC Transmitter as Joystick
If you already own a Taranis RC transmitter and want to use it as a controller, it can be configured as a USB Joystick:
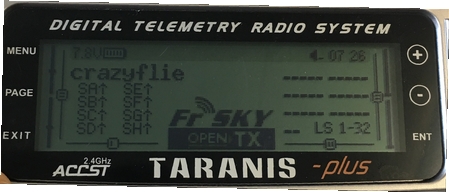
Create a new model in Taranis.
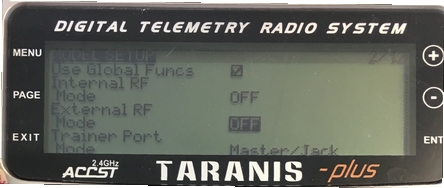
In MODEL SETUP menu page, turn off both internal and external TX modules.
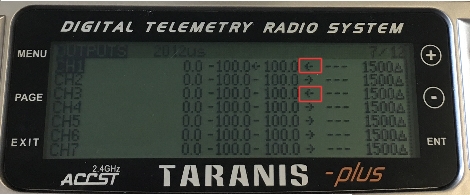
In OUTPUTS menu page (also called “SERVOS” page in some Taranis transmitters), invert Throttle (CH1) and Aileron (CH3).
To use Taranis switches to arm/disarm and switch to different flight modes:
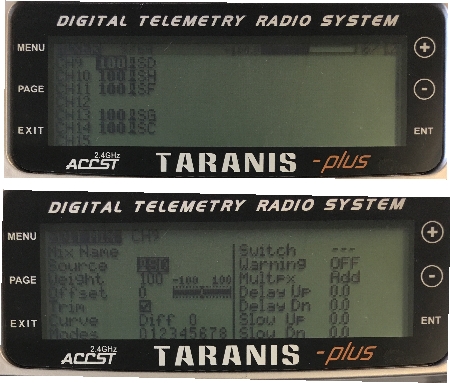
In Taranis UI MIXER menu page, you can assign the switches to any channel in the range channel 9-16 which map to the buttons 0-7 in the QGroundControl Joystick setup. For example, Taranis “SD” switch can be set to channel 9 in Taranis UI:
Connect Taranis to PC with a USB cable and Open QGroundControl.
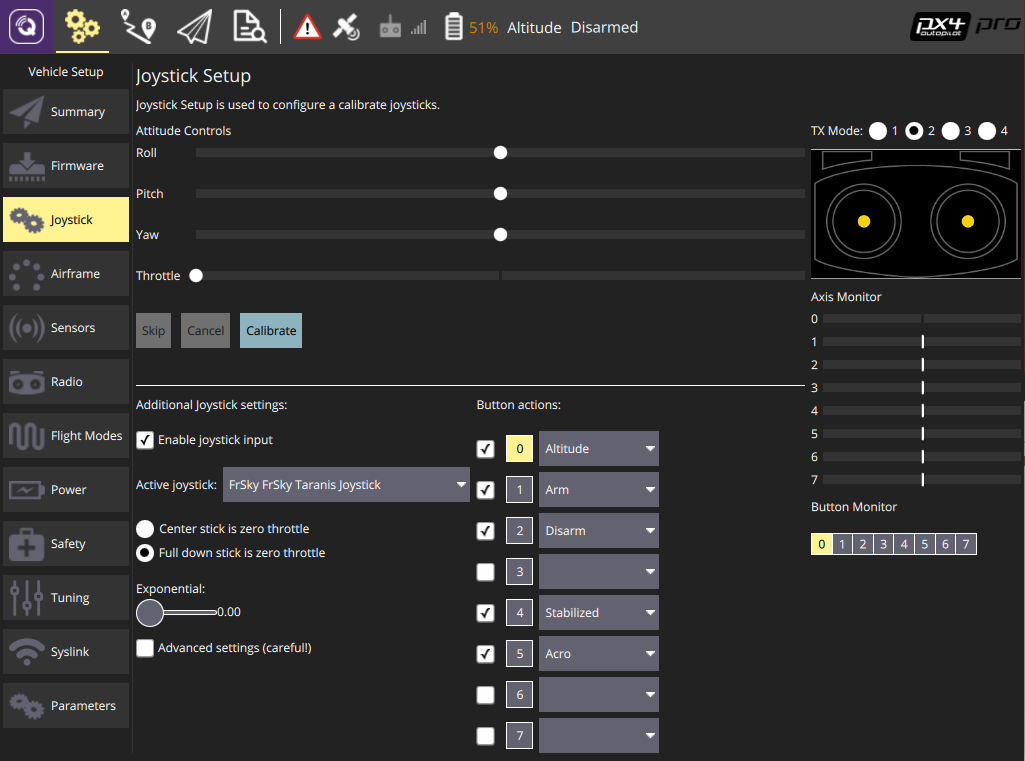
In QGroundControl Joystick Setup, you can see the buttons turning yellow when you switch them on. For example, channel 9 in Taranis maps to button 0 in QGroundControl Joystick setup. You can assign any mode to this button e.g. Altitude mode. Now when you lower the switch "SD", flight mode will change to Altitude.
ROS
To connect to Crazyflie 2.1 via MAVROS:
Start up cfbridge using the above instructions.
Change the UDP port QGroundControl listens to:
- In QGroundControl, navigate to Application Settings > General and uncheck all the boxes under Autoconnect to the following devices.
- Add in Comm Links a link of type UDP, check the Automatically Connect on Start option, change the Listening Port to 14557, add Target Hosts: 127.0.0.1 and then press OK.
Make sure you have MAVROS installed.
Start MAVROS with command:
shroslaunch mavros px4.launch fcu_url:="udp://:[email protected]:14551" gcs_url:="udp://@127.0.0.1:14557"Restart QGroundControl if it doesn't connect.